

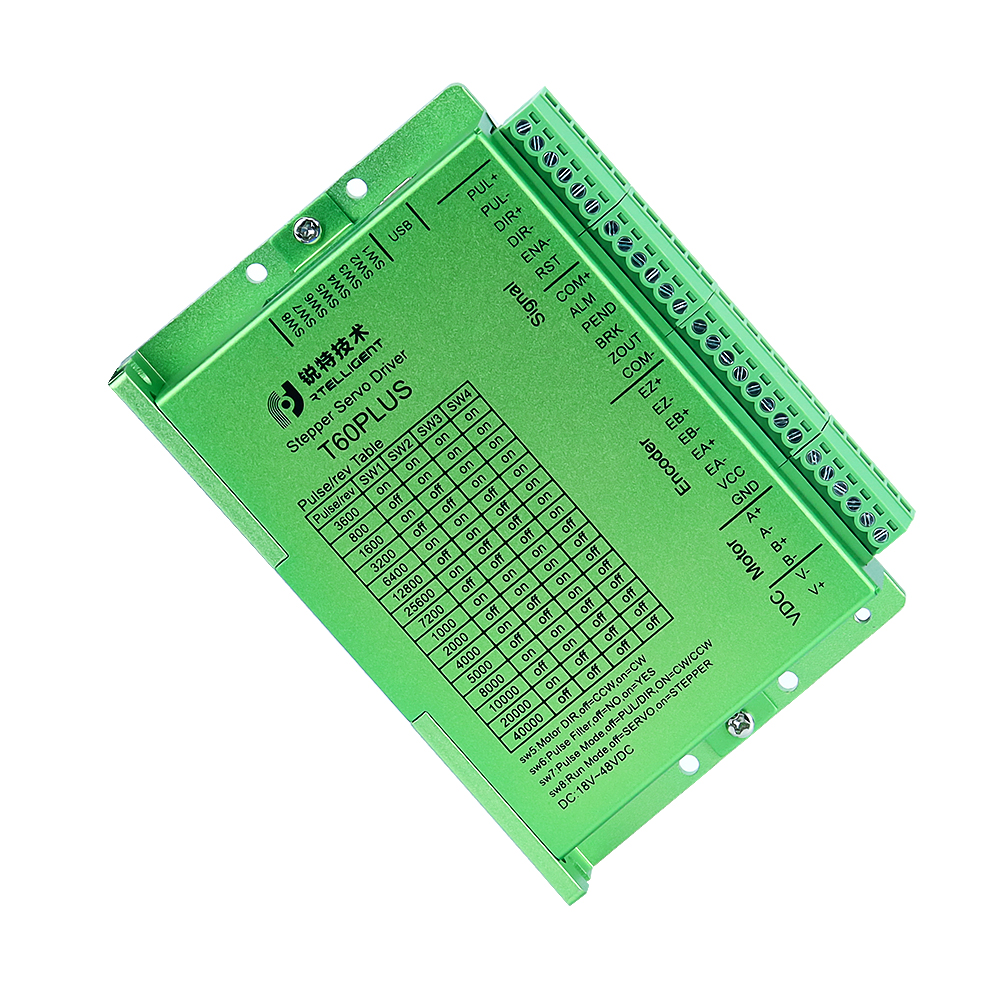
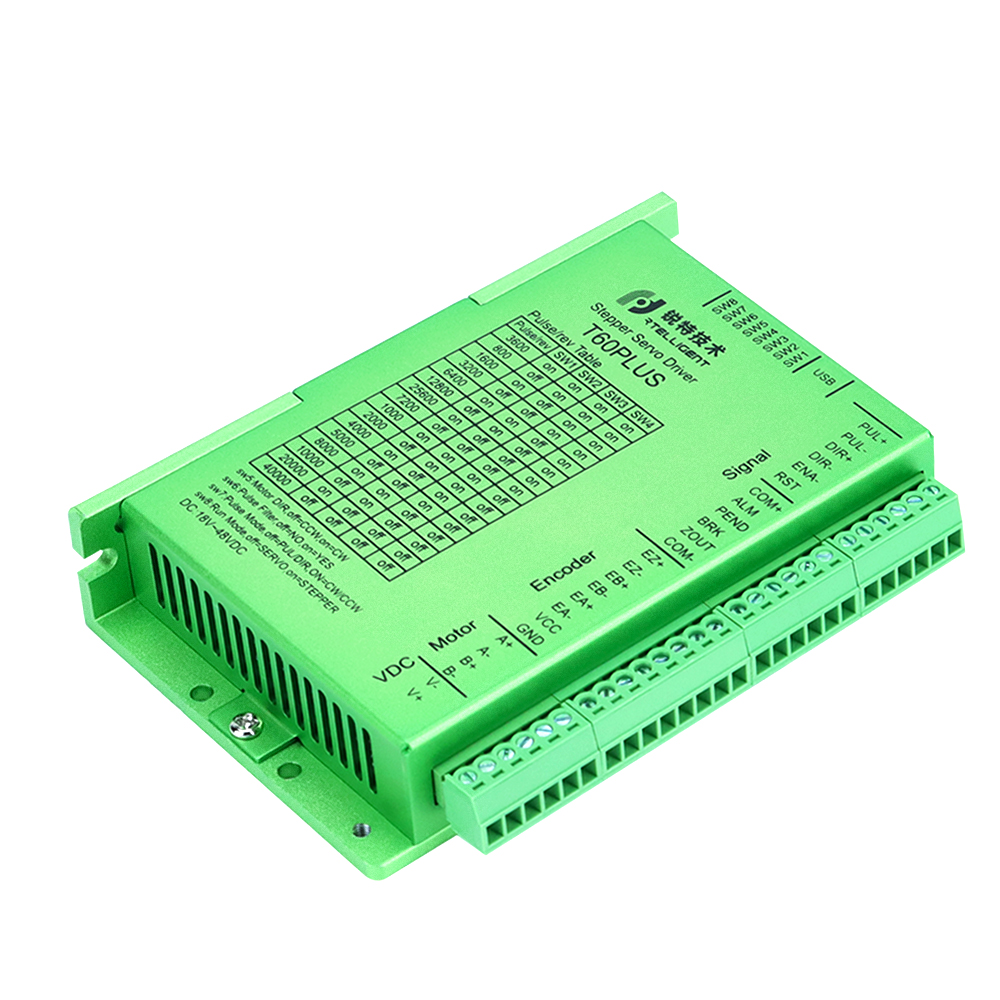


Pulskontroll 2-Phasen Zoumaache Schleifen-Schrëttantrieb T60Plus


Produktvirstellung



Verbindung

Fonctiounen
| Stroumversuergung | 18~48VDC |
| Kontrollpräzisioun | 4000 Puls/r |
| Pulsmodus | Richtung & Puls, CW/CCW Duebelpuls, A/B Quadraturpuls |
| Stroumkontroll | Servovektor Kontrollalgorithmus |
| Ënnerdeelungsastellung | DIP-Schalter-Astellung, 15 Optiounen (oder Debugging-Software-Astellung) |
| Geschwindegkeetsberäich | Konventionell 1200~1500rpm, bis zu 4000rpm |
| Resonanzënnerdréckung | Automatesch Berechnung vum Resonanzpunkt fir d'Ënnerdréckung vun der Mëttelfrequenzvibratioun |
| PID-Parameteranpassung | Debugging-Software fir d'PID-Charakteristike vum Motor unzepassen |
| Pulsfilter | 2MHz digitalen Signalfilter |
| Alarmausgang | Alarmausgang fir Iwwerstroum, Iwwerspannung, Positiounsfehler, etc. |
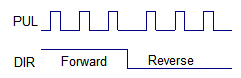
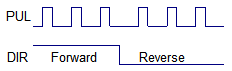
Pulsmodus
D'Signalschnittstell vum Standard-T-Serie-Undriff ass pulsfërmeg, an den T60PLUS V3.0 kann dräi Zorte vu Pulskommandosignaler empfänken.
| Puls a Richtung (PUL + DIR) |
|
| Duebelimpuls (CW + CCW) |
|
| Orthogonalen Impuls (A/B orthogonalen Impuls) | 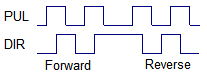 |
Mikro-Schrëtt-Astellung
| Puls/Dréizuel | SW1 | SW2 | SW3 | SW4 | Bemierkungen |
| 3600 | on | on | on | on | Den DIP-Switch gëtt op den Zoustand "3600" gedréint an d'Testsoftware kann aner Ënnerdeelungen fräi änneren. |
| 800 | aus | on | on | on | |
| 1600 | on | aus | on | on | |
| 3200 | aus | aus | on | on | |
| 6400 | on | on | aus | on | |
| 12800 | aus | on | aus | on | |
| 25600 | on | aus | aus | on | |
| 7200 | aus | aus | aus | on | |
| 1000 | on | on | on | aus | |
| 2000 | aus | on | on | aus | |
| 4000 | on | aus | on | aus | |
| 5000 | aus | aus | on | aus | |
| 8000 | on | on | aus | aus | |
| 10000 | aus | on | aus | aus | |
| 20000 | on | aus | aus | aus | |
| 40000 | aus | aus | aus | aus |
Mikro-Schrëtt-Astellung
Huet den Undriffsterminal ausgebrannt?
1. Wann et e Kuerzschluss tëscht de Klemmen gëtt, kontrolléiert ob d'Motorwicklung kuerzschloss ass.
2. Wann den internen Widderstand tëscht den Terminaler ze grouss ass, kontrolléiert w.e.g.
3. Wann ze vill Läitung un der Verbindung tëscht den Drot bäigefüügt gëtt, fir eng Läitkugel ze bilden.
Huet e zouene Schleife-Schrëttantrieb Alarm?
1. Wann e Verbindungsfehler bei der Encoderverdrahtung optrieden, gitt sécher datt Dir dat richtegt Encoder-Verlängerungskabel benotzt oder kontaktéiert Rtelligent wann Dir aus anere Grënn kee Verlängerungskabel benotze kënnt.
2. Iwwerpréift ob den Encoder beschiedegt ass, wéi zum Beispill den Signalausgang.
-
 Benotzerhandbuch vum Rtelligent T60PLUS V3.0
Benotzerhandbuch vum Rtelligent T60PLUS V3.0




